Meccanica
La meccanica riguarda tutte le teorie che riguardano lo spostamento di corpi. Non sono state individuate leggi generali per la meccanica, per tanto è stata divisa in diverse branche.
LE BRANCHE DELLA MECCANICA
La meccanica è divisibile in quattro grandi"settori", ognuna con le sue leggi. Possiamo individuare quindi:
A- La meccanica classica, applicabile nella vita di tutti i giorni;
B-La meccanica relativistica, riguardante corpi con grande massa e/0 grande velocità, come i buchi neri o corpi volanti.
C- La meccanica quantistica, riguardanti i corpi molto piccoli, quali le molecole, gli atomi e le particelle subatomiche);
D- La meccanica statistica, riguardanti sistemi contenenti un gran numero di particelle che comporta un uso di modelli matematici fondati sulla probabilità.
Le teorie quantistiche e relativistiche comportano la comprensione di concetti complessi, laboriosi e che hanno poco in comune con la vita di tutti i giorni. Pertanto sono la meccanica classica ad essere maggiormente insegnata e diffusa nelle scuole, seguita dalla meccanica statistica che verrà trattata con la termodinamica e quindi con lo studio dei gas.
IL MOTO DI UN CORPO
Definizione: Il moto di un corpo è il cambiamento della sua posizione col passare (in funzione) del tempo rispetto ad un sistema di riferimento.
Esempio.
Una macchina inizialmente ferma parte insieme ad un cronometro.
5 secondi dopo: la macchina si trova a 7 metri di distanza, in movimento.
10 secondi dopo: la macchina si trova a 18 metri di distanza, in movimento.
15 secondi dopo: la macchina si trova a 22 metri di distanza, in movimento.
20 secondi dopo: la macchina si trova a 24 metri di distanza, ferma.
Esistono infiniti tipi di moti, ognuno con le sue caratteristiche, ma tutti rappresentabili tramite un grafico spazio-tempo. Questo grafico può essere non solo bidimensionale, ma anche a più dimensioni, a seconda se stiamo considerando una, due o tre coordinate spaziali. Se lo spazio è messo in relazione col tempo tramite un'equazione, è possibile dare al moto una legge oraria. Nelle seguenti leggi orarie ometteremo l'istante di partenza T[i], che considereremo uguale a 0. Se dovete considerare T[i] diverso da 0, basterà sostituire t con (t-T[i]).
Breve chiarimento sui post successivi.
La velocità è calcolata come rapporto dello la variazione di distanza e il tempo impiegato per percorrere quello spazio.
L'accelerazione è calcolata come la variazione di velocità e il tempo in cui è avvenuta quella variazione.
Gli angoli spesso non vengono indicati in gradi (35°, 67°, 90°, etc...) ma in radianti. La conversione da gradi in radianti è: angolo(radianti)=angolo(gradi)*pi/180°.
Per pi si intende pi greco, ovvero il rapporto fra la circonferenza di un cerchio e il suo diametro e con valore approssimativo di 3.14
Per motivi tecnici, alcune funzioni verranno scritte non con dei simboli ma "a lettere". Per esempio radice quadrata->sqrt().
Per argomento di una funzione si intende ciò che si trova "dentro le parentesi" di una funzione, per esempio in sqrt(5), l'argomento è 5; in cos(x/y), l'argomento è x/y.
MOTO RETTILINEO UNIFORME
È un moto in cui lo spazio è linearmente proporzionale al tempo e segue una leggere oraria del tipo s=v*t + S (s=distanza percorsa (m); v= velocità(m/s); t=istante di tempo(s); S=spazio iniziale nell'istante t=0). Il grafico del moto sarà una retta.
Diversi moti rettilinei uniformi
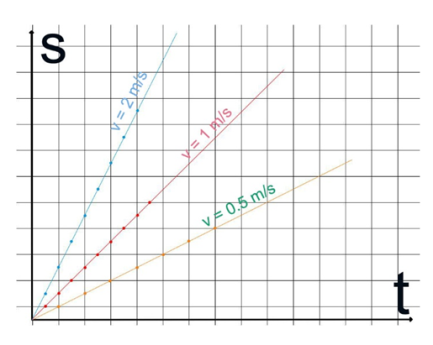
Si può notare come la pendenza dei grafici aumenti all'aumentare della velocità; infatti, più la velocità è maggiore, più velocemente si percorre lo spazio.
MOTO RETTILINEO UNIFORMEMENTE ACCELERATO
È un moto in cui la velocità è linearmente proporzionale al tempo, con legge oraria del moto di tipo s=(a*t^2)/2+V*t +S e la velocità v=a*t + V (a=accelerazione(m/s^2), V= velocità iniziale).
Si può notare che la legge oraria è un'equazione di secondo grado; pertanto il grafico sarà una parabola.
Due diversi moti uniformemente accelerati.
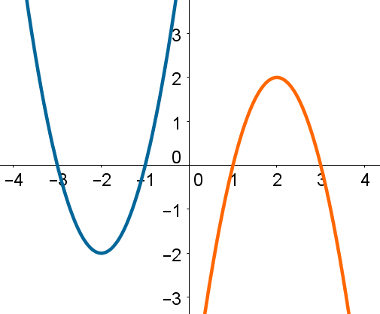
Con accelerazione positiva, la parabola sarà rivolta verso l'alto (curva sulla sinistra).
Con accelerazione negativa, la parabola sarà rivolta verso il basso (curva sulla destra).
Moto circolare uniforme
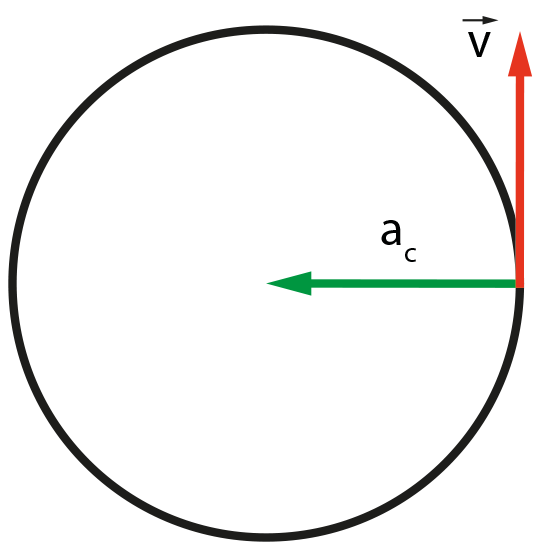
I due vettori sono perpendicolari tra di loro. L'accelerazione è diretta verso il centro, mentre la velocità giace sulla tangente alla circonferenza.
MOTO CIRCOLARE UNIFORME
È un moto in cui il corpo compie uno spostamento lungo una circonferenza a velocità costante. La velocità di un corpo lungo la circonferenza viene chiamata velocità tangenziale. Il periodo T in questo moto rappresenta il tempo necessario a compiere un giro; la frequenza f invece rappresenta i giri compiuti in un secondo, e la sua unità di misura è l'Hertz (Hz=1/s). Queste due grandezza sono inversamente proporzionali, infatti T=1/f e, viceversa, f=1/T. Sappiamo che la velocità è lo spazio percorso fratto il tempo necessario per percorrerlo; essendo la traiettoria una circonferenza (con formula 2*pi*r, in cui r è il raggio), e il tempo necessario il periodo T, allora la velocità tangenziale sarà v=(2*pi*r)/T, oppure v=2*pi*r*f.
è utile introdurre una nuova grandezza chiamata w, che indica la velocità angolare, che rappresenta la velocità con cui viene spazzato un angolo (w=angolo/tempo). Esempio: se un angolo di pi/2 (90°) viene spazzato in 3 secondi, w=(pi/2)/3=pi/6). Se l'angolo sarà di 2*pi (360°), il corpo avrà fatto un giro completo, di conseguenza t sarà uguale a T. Quindi w=(2*pi)/T oppure w=2*pi*f; facendo una veloce sostituzione otterremo che la velocità tangenziale sarà v=w*r. Abbiamo infine un'ultima grandezza, l'accelerazione centripeta, che non modifica il valore della velocità ma bensì la sua direzione. La sua formula è a=(v^2)/r, che possiamo scrivere anche come a=(w^2)*r. L'accelerazione è sempre diretta verso il centro, mentre la velocità tangenziale tange sempre la circonferenza nel punto in cui si trova il corpo.
MOTO ARMONICO
È un moto che si ottiene dalla proiezione sul diametro di una circonferenza di un punto movente di moto circolare uniforme, ma caratterizza anche altre sistemi, come quello di una molla o di un pendolo; ritroviamo certe grandezze come il periodo, la frequenza, la velocità angolare e così via. Nel moto armonico, la posizione, la velocità istantanea e l'accelerazione istantanea, oscillano sempre tra un valore minimo e un valore massimo dello stesso valore ma di segno opposto, e corrispondono rispettivamente al raggio delle circonferenza(R), la velocità tangenziale (V) e l'accelerazione centripeta(A).
La posizione segue formula s=R*cos(w*t);
La velocità segue formula v=-V*sen(w*t);
L'accelerazione segue formula a=-A*cos(w*t).